側(cè)邊懸浮
-
二維碼

工博士官方客服微信
-
聯(lián)系方式
聯(lián)系方式
電話:18621383605
服務(wù)時間 8:30~18:00
-
返回首頁
-
回到頂部
KUKA機器人上的減速機是什么
2020-02-13 11:06:36
KUKA機器人上的減速機是什么
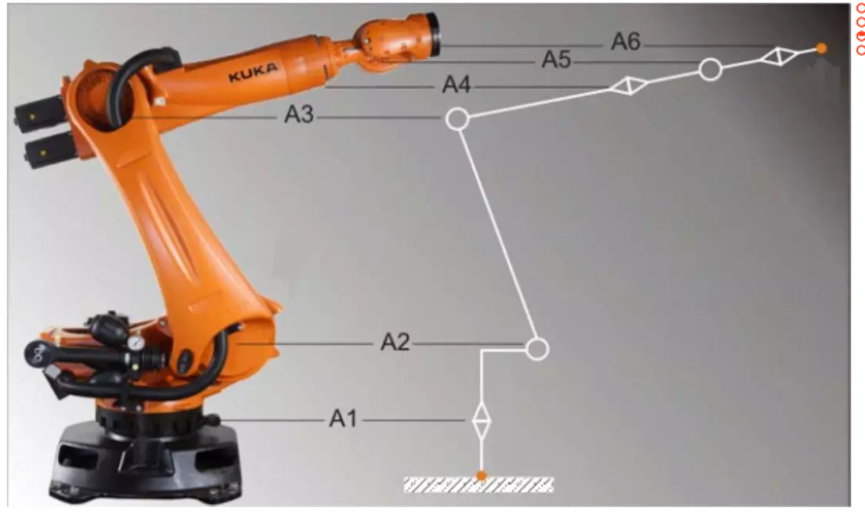
人類手臂*重要的是各個關(guān)節(jié)���、韌帶,而機器人*重要的就是每個關(guān)節(jié)中的:減速機�。這是一種精密的動力傳達機構(gòu),其利用齒輪的速度轉(zhuǎn)換器����,將電機的回轉(zhuǎn)數(shù)減速到所要的回轉(zhuǎn)數(shù),并得到較大轉(zhuǎn)矩的裝置��,從而降低轉(zhuǎn)速����,增加轉(zhuǎn)矩����。
機器人關(guān)節(jié)的運動����,*早是從液壓機構(gòu)驅(qū)動開始的�����,經(jīng)過一系列科技的發(fā)展和創(chuàng)新���,才形成了今天我們所看到的減速機����。
液壓機構(gòu)
1959 年����,世界上第一條工業(yè)機械臂被研制出來,利用了很多液壓機構(gòu)來驅(qū)動機器人關(guān)節(jié)的運動��。這是工業(yè)史上的一大創(chuàng)舉��,終于有一種靈活的機器可以替代人工機械式的勞動�����。
電動機
1973 年,庫卡改進了工業(yè)機器人的結(jié)構(gòu)��,6 個關(guān)節(jié)全部用電動機控制�,這使得機器人的結(jié)構(gòu)更加緊湊,關(guān)節(jié)動作更加靈活�,工作范圍大大增加。
電動機+液壓機構(gòu)
在制造機器人的道路上 KUKA 不斷創(chuàng)新改良�����,隨后�����,KUKA 改造了機器人的驅(qū)動結(jié)構(gòu):由電動機驅(qū)動 6 個關(guān)節(jié)��,并用液壓機構(gòu)助力以增加負載能力�����,2 號和 3 號軸中加入絲桿螺母傳動大大提高了重復(fù)精度�����。
諧波減速機
1989 年,世界格局發(fā)生了巨大變化���。有一種減速機從冷戰(zhàn)的高墻之內(nèi)解禁出來�����,很快被用在民用工業(yè)機器人上。負載能力與精度兼?zhèn)渲?��,機器人結(jié)構(gòu)變得十分簡潔��,運行非常靈活�。這款神奇的減速機就是大名鼎鼎的“諧波減速機”(Harmonic Drive)����。
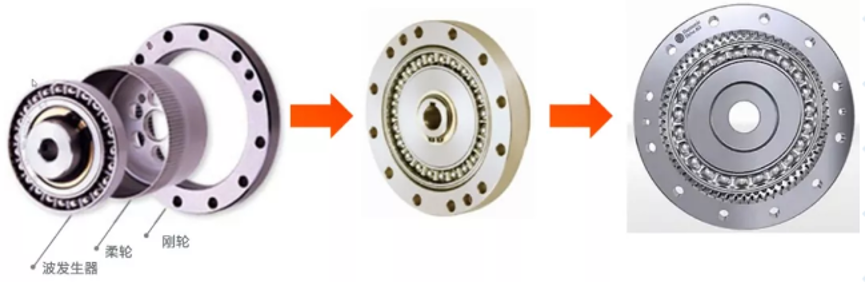
諧波減速機的結(jié)構(gòu)十分簡單,是由波發(fā)生器����、柔輪、剛輪三部分組成�。其原理是利用柔輪與剛輪的齒數(shù)差,以及柔輪在運行時的可控形變來達到減速與傳遞動力的目的����。
自重輕�、體積小�、減速比高、傳動力矩大�����、反向間隙小����、精度高、運行平滑效率高等諸多優(yōu)點使得諧波減速機在上世紀 80 年代末���,90 年代初被廣泛使用在機器人身上��。
RV 減速機
科技飛速發(fā)展���,緊接著另一種減速機進入了機器人研發(fā)工程師的視線——RV 減速機(Rotary Vector Drive)。RV 減速機是行星減速機與擺線輪減速機的結(jié)合����。利用行星輪軸的偏心驅(qū)動力使得擺線盤在外圈上擺動,達到減速與動力傳遞的目的�。它既有行星減速機減速比變化范圍大的特點又有擺線輪反向間隙小��、傳動力矩大的特點�。而且體積相對較小�,十分適合安裝在機器人上使用。
行星減速機(左) 擺線輪減速機(中) RV 減速機(右)
劃重點:
諧波減速機更輕����,所以目前 KUKA 的小機器人(KR 6 Agilus, KR 10 Agilus, LBR iiwa)采用諧波減速機。
RV 減速機更耐沖擊�,所以 KUKA 較大體型的機器人都采用 RV 減速機�����。也有個別機器人身上兩種都有(KR 3 Agilus)����。

